lucamifbuh
New member
- Joined
- Nov 2, 2023
- Messages
- 4
Hello all,
This is my first post on this forum, but I have been actively following the community for a while.
I wanted to see whether anyone has some kind of experience with the 1DA torque value on the EV-CAN. I am a student working on a dissertation on regenerative braking, and I am using data from the CAN bus to facilitate data collection. However, I cannot understand something with the data and was hoping that while contibuting some information (I intend to make the data available to the community following completion of the project), someone can give a hypothesis on this anomaly.
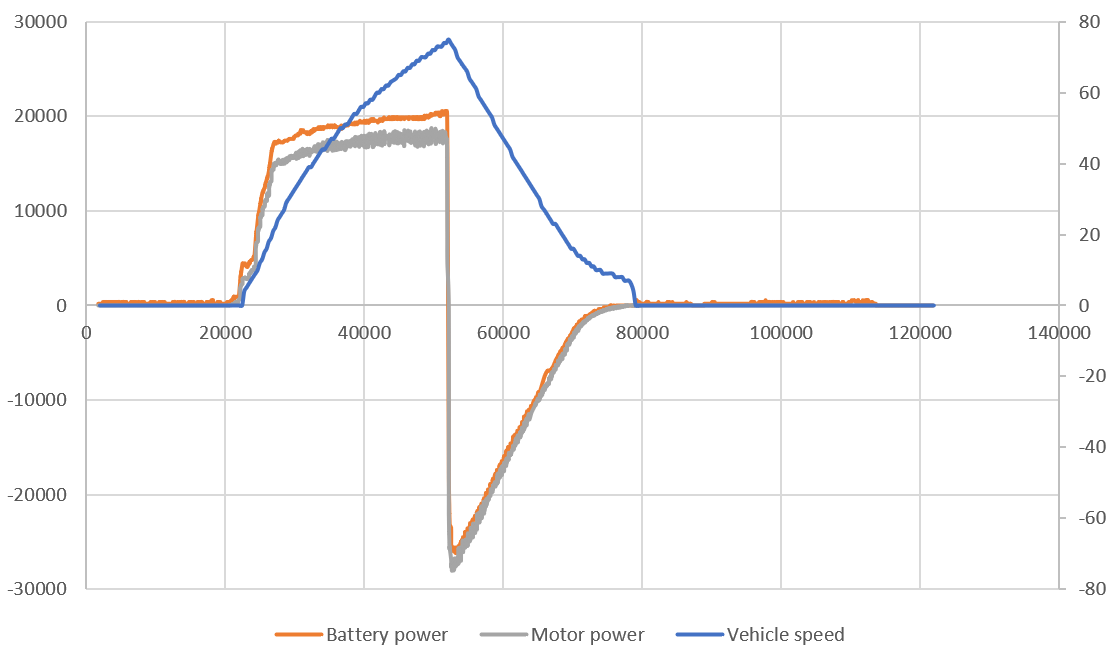
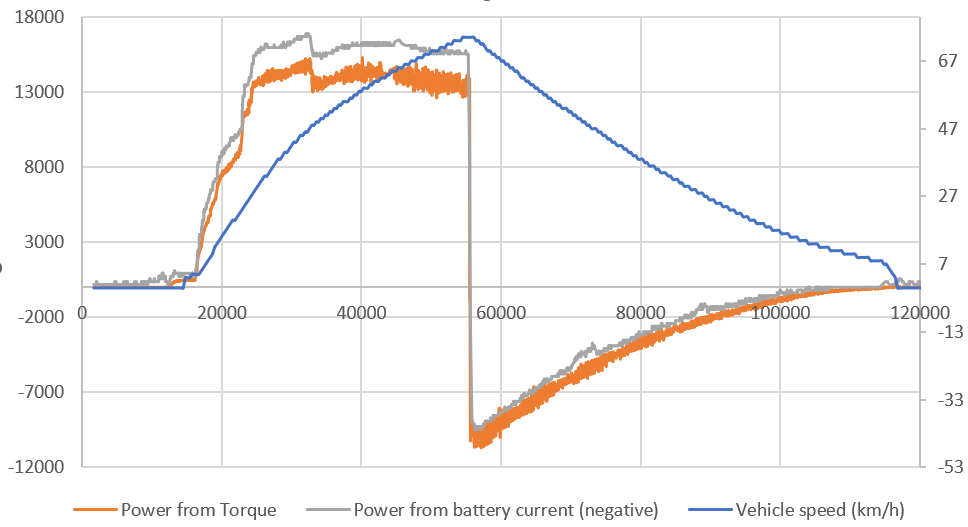
So the below graph shows the test. I accelerated to a constant speed, and then used regenerative braking to slow the vehicle down (it is in standard Drive mode - the car is a AZE-0 30 kWh model). I plotted two power values, one from the battery (voltage * current*-1) and one from the torque value on the 1DA message (torque * RPM *(2pi/60)). I expect there to be a gap between the two owing to inefficiencies. However, it is clear that the gap is far larger when accelerating than decelerating. I do not have any explanation for this. Any ideas are greatly appreciated.
Thanks in advance!
This is my first post on this forum, but I have been actively following the community for a while.
I wanted to see whether anyone has some kind of experience with the 1DA torque value on the EV-CAN. I am a student working on a dissertation on regenerative braking, and I am using data from the CAN bus to facilitate data collection. However, I cannot understand something with the data and was hoping that while contibuting some information (I intend to make the data available to the community following completion of the project), someone can give a hypothesis on this anomaly.
So the below graph shows the test. I accelerated to a constant speed, and then used regenerative braking to slow the vehicle down (it is in standard Drive mode - the car is a AZE-0 30 kWh model). I plotted two power values, one from the battery (voltage * current*-1) and one from the torque value on the 1DA message (torque * RPM *(2pi/60)). I expect there to be a gap between the two owing to inefficiencies. However, it is clear that the gap is far larger when accelerating than decelerating. I do not have any explanation for this. Any ideas are greatly appreciated.
Thanks in advance!